您的位置:首页 > 软件教程 > 教程 > NASA研发“刺猬”机器人:旋转行走征服外星
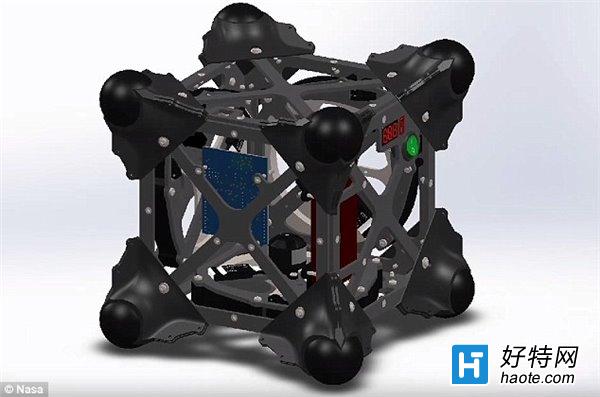
喷气动力实验室的“刺猬”漫游者原型机具有8个突起和3个调速轮,重量为5千克,研究人员预计在装上摄像机和光谱仪等设备后,它的重量会超过9千克。斯坦福大学研制的原型机稍微小一点,重量也轻一点,具有的突起也较短。利用内部的调速轮和制动系统,这两种原型机都可以进行旋转和急停等动作。
目前,研究人员还在对“刺猬”漫游者的自动化性能进行研究,希望使其在没有地球指令的情况下,完成尽可能多的任务。
使用Blender生成城市模型
全球气象数据ERA5的下载方法
Xpath解析及其语法
机器学习:神经网络构建(下)
华为Mate品牌盛典:HarmonyOS NEXT加持下游戏性能得到充分释放
实现对象集合与DataTable的相互转换
硬盘的基本知识与选购指南
如何在中国移动改变低价套餐
鸿蒙NEXT元服务:论如何免费快速上架作品
丰巢快递小程序软件广告推荐关闭方法
如何在ArcMap软件中进行栅格图像重采样操作
算法与数据结构 1 - 模拟
升讯威在线客服与营销系统介绍
腾讯视频夜间模式设置教程
基于鸿蒙NEXT的血型遗传计算器开发案例
5. Spring Cloud OpenFeign 声明式 WebService 客户端的超详细使用
Java代理模式:静态代理和动态代理的对比分析
Win11笔记本“自动管理应用的颜色”显示规则
飞天萌猫 V1.0.0 安卓版
欧洲运输卡车模拟器 V1.1 安卓版
妄想山海乾坤 V2.0.2 安卓版
重返帝国 V0.8.2.188 安卓版
迷你世界 V1.9.0 安卓版
赛车计划Go V1.0.1 安卓版
2018好看的电影介绍
钢筋直径符号快捷输入方法
2017年清宫图生男生女表,生男生女早知道
2016年网络游戏赚钱排行榜
思仙 V1.5.6 安卓版
决战玛法 V7.5.0 安卓版
校花的贴身高手天阶岛福利版 V1.0 安卓版
闪烁之光 V1.9.7 安卓版
群英之战 V1.0 安卓版
仙语奇缘连抽版 v1.0.4 安卓版
阿拉德之怒 V5.2.3 安卓版
纯三国送无限资源 V1.0 安卓版
天空之息 V1.0 安卓版
伏魔诀(无限送真充) V1.0 安卓版
魂斗罗归来 V1.3.34.6820 苹果版
王者荣耀 V1.20.1.17 苹果版
超进化物语ios版 V1.1.0 苹果版
阴阳师 V1.0 IOS版
轩辕传奇手游 V1.0.30.1 苹果版
和平精英ios版 V1.1.16 苹果版
剑侠情缘手游iPhone版 V1.3.1 IOS版
梦幻西游无双2ios版 V1.3.6 苹果版
一起来捉妖 V1.4.648.1 苹果版
剑与家园IOS版 V1.14.4 苹果版
关于好特 联系我们 最近更新 本站声明 软件分类 推荐排行
频道 视频 评测 专题 网游 安卓 礼包 app下载
推荐 原创 佳游月榜 新游周刊 好特播报
热门 角色 动作 卡牌 射击 空战 竞速 音乐
扫二维码进入好特网手机版本!
扫二维码进入好特网微信公众号!
本站所有软件,都由网友上传,如有侵犯你的版权,请发邮件[email protected]
湘ICP备2022002427号-10 湘公网安备:43070202000427号© 2013~2025 haote.com 好特网