��һ̨�����˻ὫiPhone��Ļ�ӱ����ϲ��¡��豸ͨ�����ʹ��ִ���һվ��������Ҫ�����ǵ�ء��ڲ�ж���ʱ�����ܻ����𣬶Բ����ߵ�������ȫ������в��Liam�ܰ�ȫ����Ϊ������Ҫ�˸�Ԥ��
�ֻ��������ͬ�ķ�ʽ�ռ�������������˿������С�ܵ���Ȼ�����ڸ����������ڣ�SIM���۶���ϵͳ�·���СͰ�С�ÿ������������һ��С����ʾ��������iPad����Щ��֣����������ٻ����˵��ڲ������������豸�Ĵ������̡������ж���ʱ���������⣬���翨���˻����У���Ļ������㡰����ʧ�ܡ��������ص��¶ȹ��ߣ�ϵͳҲ��ע���
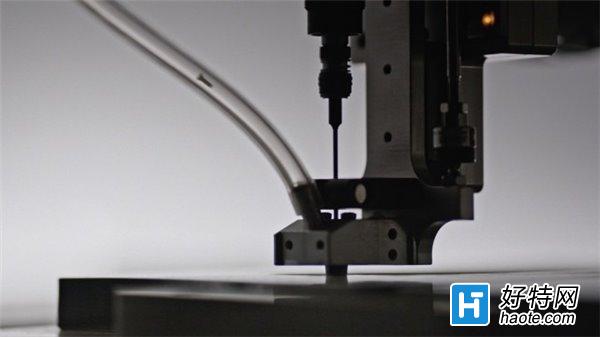
��ͼ4����˿ͨ���ܵ����գ�
��һЩ��λ�ϣ���̨�����˻���ӹ��������磬iPhone������Ϊ��ʴ�����أ���һ̨��������Ҫ����5�β��ܲ����˿����ʱ�ڶ�̨�����˻���ͬһ�豸��ִ��������������ٶȲ����ܵ�Ӱ�졣ƻ������Liam����������ijɹ��ʸߴ�97%��
ƻ���Ѿ��Բ����ˮ�߽������Ż������ij�������˷������ϣ������������̿��Լ�������30���ӣ�ֱ���������������ߡ����������������������Ա������ʱ���룬����������ɹ�������һ������ʦ�Ͻ��������ˡ�
Liam���һ̨iPhoneֻҪ11�롣�մ˼��㣬һСʱ���Բ��350̨�ֻ���һ����Բ��120��̨��ƻ����Ը��¶Liam��ʱ��ʼͶ����Ӫ����ֻ��ǿ��˵Liam��Ȼ�����з��Ρ���Ŀǰ�İ�����������һ������Liam��Ҫ��������ĩ����Ϣ����
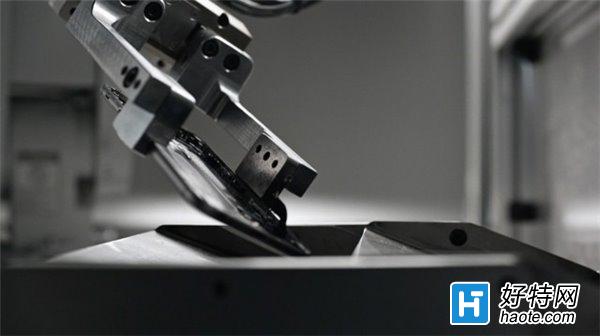
��ͼ5�������Ļ��
�Ӹ����ʵ
Liam��������Ƴ������أ�Ϊ�������Ŀ��ƻ��Ƹ����һ��רҵ����ʦ�Ŷӣ���ģ�������Ǹ������Liam����һ��ƻ���Ŷ�Ϊ��ж���̱�д����Ϊ��Ѱ�Ҳ�жiPhone����ѷ�����Liam����ʦ�����о��������ֻ�������������з������У��ŶӰݷ��˷ֽ⼼������������������Ϊ�Զ��������û�����Э�������������Ƴ�ԭ���ϵ���ѷ�ʽ��
С���Ƽ��Ķ�������3�������شű�ն�������£����ԡ����ܡ��ӵ�һ������ת�����شű�ն��
�Ķ��������۷�֮ս�������������Լ���ָ�ϣ������Ӣ�۸���ǿ�����쳬��Ӣ�ۣ�������������ʼ����
�Ķ�������ũ��С������Ƥ���������Լ��ɴ�ȫ����������ؼ�����Ҳ��ӵ��С�����һ�棩
�Ķ�����ؽ����Ρ���ʯ���ԡ�����ȡ;����ʹ�÷���
�Ķ�Ӣ����������32�·���Ч��һ����ȫ���£������·��ģ��������ǿ���ݣ���
�Ķ���������С��ʿѫ�´����Ƽ������ؼ���������ǿС��ʿ�������Ϊ�Ŷ��е���������
�Ķ�����֮����;����ȫ����ָ�ϣ���ɫɳĮ������������ɻ�ȡ����֮�꣩
�Ķ�����ƽ��Ӣ��ף������ֲ�λ��һ����ȫ����ָ�ϣ��ҵ�ף�����ᣬ����������ĸ�������������ϷΪ���ĵ�ͼָ����
�Ķ���������ҫ����ӧװ����ȡ���ɹ��ԣ�һ��������������Ƥ������
�Ķ���DNF��������ı��ս�ǻ����������ؼ���ȫ�����ɡ��ؿ����ԡ�����ʹ�ã�
�Ķ���������ڽ����ٶȽ�������ָ�ϣ����綼�Ȳ��ϵļ������飬��Ϸ���ɴ���أ�
�Ķ�̽��������������ָ���а�����ʿ�����ܣ�����������һ�����ҿ����ţ�̽���˽���Ϸ�еĽ�ɫ���
�Ķ��Է���ѧ¹������ǿ��װ�Ƽ������ؼ������첻���赲��¹����
�Ķ�����������ħ������ħ����ϰ���¿�һ����ȫ���¡���̽�������磬չ��ħ��֮�ã���
�Ķ����λ������ɡ�װ����ȡ��ʽ��ȫ���£��������ո���װ����ȡ���ɣ�Ϊ��Ľ�ɫ����ʵ����
�Ķ���������ԴSSR�齱���ʽ�����SSR�齱���ʾ����Ƕ����أ�������ϷΪ���������˽�齱��������ࣩ
�Ķ�����֮�����Ρ������������Լ��ɴ�ȫ����
�Ķ��������ԡ�32��ͨ�ع��Լ���ָ�ϣ�����������������ԣ�����ͨ�أ�
�Ķ���վ�������������������ϴ��������ַ���İ�Ȩ���뷢�ʼ�[email protected]
��ICP��2022002427��-10 �湫��������43070202000427��© 2013~2025 haote.com ������












