�������������ػ��Ĺ��̣�������Ҫ����ͷ�������ConvertToSphericalVoxel��spherical_voxel_optimized����ϸ�����˲����������á��������ػ�ͨ��������ת��Ϊ��������ϵ����������Ӧ����Ȩ����ƽ�ⲻͬγ������ĵ��ܶȣ��Ӷ���Ч���������������л��ᵽC++��s
�ο����ӣ�
������ɣ�
ConvertToSphericalVoxel�ࣺ��߽ӿڣ�ʵ����һ��converter�࣬����convertת���ֲ�����
��
spherical_voxel_optimized��������convert�е��ã�ʵ��ת������ת������������ϵ��Ȼ��������ػ�
��
spherical_voxel.compute����������ʵ�����ػ�����pybind��C++��������ʵ��
from utils import geometry as ug
class ConvertToSphericalVoxel():
"""
Convert point cloud to spherical voxel [beta = 2 * bandwidth, alfa = 2 * bandwidth, num_radial_division].
Alfa in [0, 2pi], Beta in [0, pi]
"""
def __init__(self, bandwidth, radius_support, num_radial_division, num_points, random_sampling):
self.bandwidth = bandwidth
self.radius_support = radius_support
self.num_radial_division = num_radial_division
self.num_points = num_points
self.random_sampling = random_sampling
def __call__(self, point_cloud):
features, pts_normed = ug.spherical_voxel_optimized(points=point_cloud,
size_bandwidth=self.bandwidth,
size_radial_divisions=self.num_radial_division,
radius_support=self.radius_support,
do_random_sampling=self.random_sampling,
num_random_points=self.num_points)
return features, pts_normed
����
True
ʹ���ھֲ������ڵĵ�������Ӷ��������������ھֲ��ܶȹ�����Ͷ����µ���Ϣ��ʧ����������������������³���ԣ���Ӧ��ͬ���Ƶķֲ���
def spherical_voxel_optimized(points: np.ndarray, size_bandwidth: int, size_radial_divisions: int,
radius_support: float, do_random_sampling: bool, num_random_points: int) \
-> Tuple[np.ndarray, np.ndarray]:
"""Compute spherical voxel using the C++ code.
Compute Spherical Voxel signal as defined in:
Pointwise Rotation-Invariant Network withAdaptive Sampling and 3D Spherical Voxel Convolution.
Yang You, Yujing Lou, Qi Liu, Yu-Wing Tai, Weiming Wang, Lizhuang Ma and Cewu Lu.
AAAI 2020.
:param points: the points to convert.
:param size_bandwidth: alpha and beta bandwidth.
:param size_radial_divisions: the number of bins along radial dimension.
:param radius_support: the radius used to compute the points in the support.
:param do_random_sampling: if true a subset of random points will be used to compute the spherical voxel.
:param num_random_points: the number of points to keep if do_random_sampling is true.
:return: A tuple containing:
The spherical voxel, shape(size_radial_divisions, 2 * size_bandwidth, 2 * size_bandwidth).
The points used to compute the signal normalized according the the farthest point.
"""
if do_random_sampling:
min_limit = 1 if points.shape[0] > 1 else 0
indices_random = np.random.randint(min_limit, points.shape[0], num_random_points)
points = points[indices_random]
pts_norm = np.linalg.norm(points, axis=1)
# Scale points to fit unit sphere
pts_normed = points / pts_norm[:, None]
pts_normed = np.clip(pts_normed, -1, 1)
pts_s2_coord = S2.change_coordinates(pts_normed, p_from='C', p_to='S')
# Convert to spherical voxel indices
pts_s2_coord[:, 0] *= 2 * size_bandwidth / np.pi # [0, pi]
pts_s2_coord[:, 1] *= size_bandwidth / np.pi # raw 2*size_bandwidth/2*np.pi
pts_s2_coord[:, 1][pts_s2_coord[:, 1] < 0] += 2 * size_bandwidth
# Adaptive sampling factor sin{pi*[(1/2,..., 2*size_bandwidth+1/2)/(2*size_bandwidth)]}
# �ܸ��õľۺϵ�����Ϣ������Ҳ�ᵼ�¸�����α䣬�еñ���ʧ
daas_weights = np.sin(np.pi * (2 * np.arange(2 * size_bandwidth) + 1) / 4 / size_bandwidth).astype(np.float32)
voxel = np.asarray(sv.compute(pts_on_s2=pts_s2_coord,
pts_norm=pts_norm,
size_bandwidth=size_bandwidth,
size_radial_divisions=size_radial_divisions,
radius_support=radius_support,
daas_weights=daas_weights))
pts_normed = points / np.max(pts_norm)
return voxel.astype(np.float32), pts_normed.astype(np.float32)
pts_norm
��local patch�ĵ��ƾ�����룬����
local patch�����ʱ����þ������ڹؼ�������Ļ�����
����Ȼ���������ǹ�������ϵԭ��ġ�
S2.change_coordinates
���ڽ����ƴӵѿ�������ϵת������������ϵ����������ϵ���ͼ�WIKI������˵�����������꣬ά�ȽǶ�����\beta���;��ȽǶ�����\alpha
��
��ʾ����ͬ�����������죬��ͬ����ĵ��ܶȻ�������ͬ�����磬������ļ�������γ�Ƚӽ�
0
��
��
������ͬ���ĽǶȱ仯���ܸ��ǵ����������С�����ڳ����������ϴ�Ϊ�˱�������Щ�����г��ֹ��Ȼ���IJ���������Ӧ����Ȩ������ƽ�ⲻͬγ�������Ӱ�졣
sv.compute
��������ת����
�ú�������pybind��C++�������ļ�Ϊ
spherical_voxel.cc
������������£�
const float interval = radius_support / (size_radial_divisions);
std::vector > > > > grids;
std::vector > > features;
grids.resize(size_radial_divisions);
features.resize(size_radial_divisions);
for (auto &beta: grids) {
beta.resize(2 * size_bandwidth);
for (auto &alpha: beta) {
alpha.resize(2 * size_bandwidth);
}
}
for (auto &beta: features) {
beta.resize(2 * size_bandwidth);
for (auto &alpha: beta) {
alpha.resize(2 * size_bandwidth, 0);
}
}
// mapping the points to the voxel grid
for (size_t i = 0; i < pts_on_s2.size(); i++) {
int r_idx = int(pts_norm[i] / interval);
// except for the points radius larger than radius_support
if (r_idx > size_radial_divisions - 1) r_idx = size_radial_divisions - 1;
int beta_idx = int(pts_on_s2[i][0] + 0.5f);
if (beta_idx > 2 * size_bandwidth - 1) beta_idx = 2 * size_bandwidth - 1;
int alpha_idx = int(pts_on_s2[i][1] + 0.5f);
if (alpha_idx > 2 * size_bandwidth - 1) alpha_idx = 2 * size_bandwidth - 1;
grids[r_idx][beta_idx][alpha_idx].emplace_back(std::vector{pts_norm[i], pts_on_s2[i][0], pts_on_s2[i][1]});
}
��������ÿ���㣬����ÿ����ľ�����������
r_idx
�����������
beta_idx
��������������
alpha_idx
��Ȼ��push����Ӧ���������档
���ȼ���ÿ�����صľ���������������߽�
left
��
right
��Ҳ����˵ÿ�����ص��������㲢������ֻ���DZ������ڲ�������һЩ���ܳ��ֵ��������أ�������������ұ߽���õ�����ӦȨ�أ�ά�ȸߵģ����ұ߽���һЩ��
֮��������ұ߽���ʶ�Ӧ���أ���ȡ�����������е㣬���ھ������ȷ�����Ƿ����������ģ�Խ�����õ������Ȩ��Խ��[0, 1]����
Ȼ���Ǿ������������ڲ��ĵ㣬���ڱ����ص��������㣬��Ϊ�Ӿ����ǣ���ֲ������������Ҫ������������Ϣ��
�����㱾���ص��������ܶ��������ӹ�Ȩ�ĵ��������
// compute the feature of each voxel
for (size_t i = 0; i < size_radial_divisions; i++) {
for (size_t j = 0; j < 2 * size_bandwidth; j++) {
for (size_t k = 0; k < 2 * size_bandwidth; k++) {
const float left = std::max(0.f, k - 0.5f / daas_weights[j]);
const float right = std::min(2.f * size_bandwidth, k + 0.5f / daas_weights[j]);
float sum = 0.f;
int cnt = 0;
for (int m = int(left + 0.5f); m < int(right + 0.5f); m++) {
for (int n = 0; n < grids[i][j][m].size(); n++) {
if (grids[i][j][m][n][2] > left && grids[i][j][m][n][2] < right) {
sum += 1.f - std::abs(grids[i][j][m][n][0] / interval - (i + 1)); // radial feature weight
cnt++;
}
}
// ��ʵ������У��������ݿ��ֲܷ����������ڵľ���ָ�֮�䣬
// �����ǵ���ľ������λ����������ָ�ı߽總��ʱ��
// Ϊ�˷�ֹ�����ǵ�ǰ����ָ��������Ϣ�Ķ�ʧ��
// �����������ھ���ָ������������ĵ㣬�������ǵĹ���Ҳ�ӵ���ǰ���ص�Ԫ������ֵ�С�
if (i < size_radial_divisions - 1) {
for (int n = 0; n < grids[i + 1][j][m].size(); n++) {
if (grids[i + 1][j][m][n][2] > left && grids[i + 1][j][m][n][2] < right) {
sum += 1.f - std::abs(grids[i + 1][j][m][n][0] / interval - (i + 1));
cnt++;
}
}
}
}
// �뾶��ָͬ��γ�ȷָ�� beta �������������������еĽǶȣ�
// �ָ�����������ͬ�ġ�����������
// ����������£�ÿ��γ�ȷָ��Ӧ��������������ȷ�ģ�
// ����Щ�ָ�����֮��û�н��棬��˵㲻�ᡰ��Խ������һ��γ�ȷָ
if (cnt > 0) {
features[i][j][k] = sum / cnt;
}
}
}
}

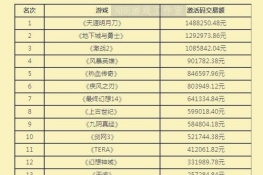
��ΪMateƷ��ʢ�䣺HarmonyOS NEXT�ӳ�����Ϸ���ܵõ�����ͷ�
�Ķ�����NEXTԪ�����������ѿ����ϼ���Ʒ
�Ķ������ArcMap�����н���դ��ͼ���ز�������
�Ķ����ں���NEXT��Ѫ���Ŵ���������������
�Ķ�5. Spring Cloud OpenFeign ����ʽ WebService �ͻ��˵ij���ϸʹ��
�Ķ�Java����ģʽ����̬�����Ͷ�̬�����ĶԱȷ���
�Ķ�Win11�ʼDZ����Զ�����Ӧ�õ���ɫ����ʾ����
�Ķ���վ�������������������ϴ��������ַ���İ�Ȩ���뷢�ʼ�[email protected]
��ICP��2022002427��-10 �湫��������43070202000427��© 2013~2025 haote.com ������